Azolla : le plus court chemin entre deux points …
C'est bien connu, le plus court chemin entre deux points, c'est la ligne droite !
Dans cet article, je vous propose de mettre en application cet adage dans Azolla, un simulateur robotique 2D. Il s'agit ici de faire aller le robot sur une cible déposée sur le monde. Pour cela, nous allons comparer les coordonnées du robot et de la cible et faire avancer le robot dans la direction de la cible jusqu'à ce que leurs coordonnées soient égales (ou presque).
- Les coordonnées du robot sont accessibles par la méthode :
-
getposition(numrobot)
-
- Les coordonnées de la cibles sont accessibles par la méthode :
-
gettarget(numcible)
-
 L'orientation du robot est accessible par la méthode
L'orientation du robot est accessible par la méthode
-
-
getangle(numrobot)
-
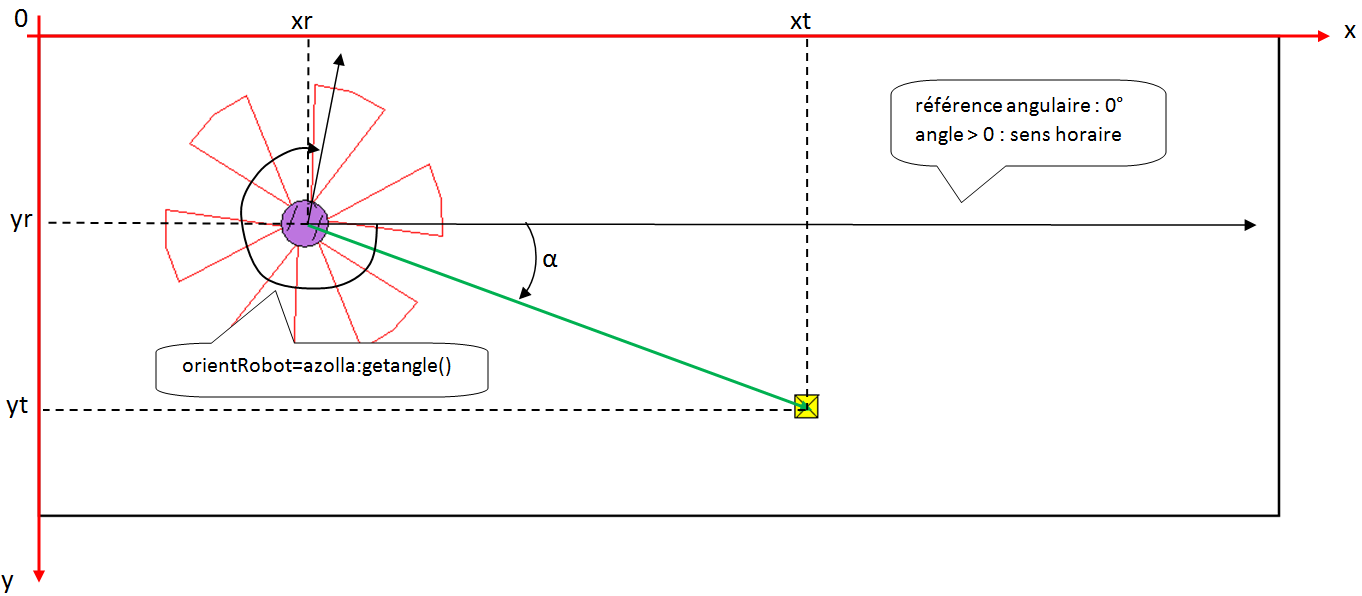
Le robot doit donc tourné pour prendre la direction de la cible, ici, d'un angle α.
Attention, les angles sont donnés en radian et sont orientés dans le sens horaire et non pas trigonométrique.
Le calcul de l'angle α fait appel aux formules trigo bien connues dans un triangle rectangle :
 L'utilisation de la méthode atan de la classe math permettra d'accéder à l'angle α.
L'utilisation de la méthode atan de la classe math permettra d'accéder à l'angle α.
Les angles sont orientés et compris entre 0 et 2Pi, il faut donc s'assurer de leur conformité :
- Si α < 0 : α = α + 2Pi (orientation dans le mauvais sens)
- Si α > 2Pi : α = 2Pi - α (1 tour complet + l'angle)
Si vous déplacez le robot à droite de la cible, vous remarquerez que s'il s'aligne bien avec la cible, il se dirige en sens contraire. Dans ces conditions, on a xr > xt et donc xt - xr <0 donc l'angle α est négatif. On corrige le problème en testant le cas ou xr > xt :
Quelques améliorations peuvent être apportées comme définir le sens de rotation pour que le robot s'aligne avec la cible en fonction de sa position initial par le plus court chemin. Actuellement, il tourne toujours vers la droite :
Vous pouvez également modulariser le programme en écrivant une fonction tourner(angle) puis une fonction allerA(cible) pour permettre au robot de se diriger vers plusieurs cibles successivement.
A vous de jouer ...
Trackbacks are disabled.