Production de sites web NSI
Le programme de la spécialité NSI précise que cet enseignement a vocation à multiplier les occasions de mise en activité des élèves, sous des formes variées qui permettent de développer des compétences transversales:
- faire preuve d’autonomie, d’initiative et de créativité ;
- présenter un problème ou sa solution, développer une argumentation dans le cadre d’un débat ;
- coopérer au sein d’une équipe dans le cadre d’un projet ;
- rechercher de l’information, partager des ressources ;
- faire un usage responsable et critique de l’informatique.
Un enseignement d’informatique ne saurait se réduire à une présentation de concepts ou de méthodes sans permettre aux élèves de se les approprier en développant des projets applicatifs.
Une part de l’horaire de l’enseignement en classe de première est réservée à la conception et à l’élaboration de projets conduits par des groupes de deux à quatre élèves.
Les projets réalisés par les élèves, sous la conduite du professeur, constituent un apprentissage fondamental tant pour la compréhension de l’informatique que pour l’acquisition de compétences.
Il s'agit ici de mettre en pratique les concepts appris lors des activités HTML/CSS/JavaScript pour réaliser un petit site web ergonomique et dynamique.
MQTT avec Qt
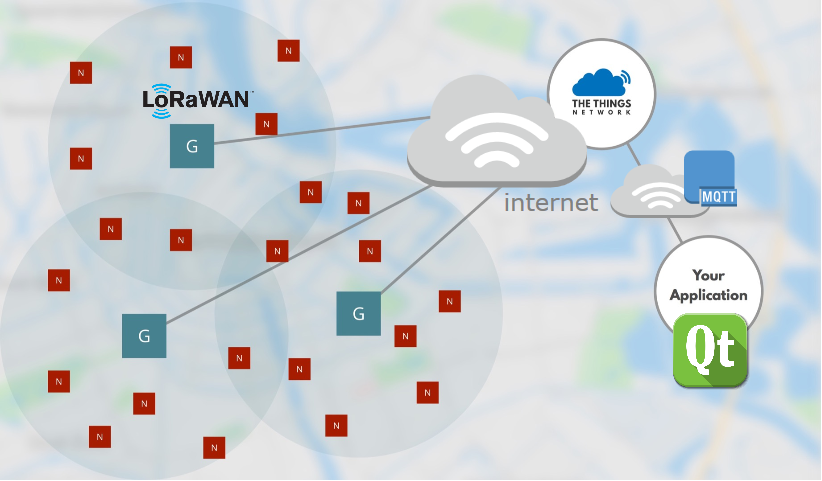
MQTT est un protocole de connectivité Machine-to-Machine (M2M) de l'Internet des Objets. Il a été conçu pour le transport de messages par publication/souscription et est extrêmement léger.
The Things Network utilise MQTT pour publier les activations et les messages des nœuds LoRa qu'il référence. Nous avons vu dans l'article précédant comment accéder à ses messages via le nœud MQTT de Node Red.
Je vous propose ici de réaliser une application client avec Qt qui accèdera directement aux messages via MQTT au travers de l'utilisation du module Qt MQTT.
The Things Network et Node Red
Dans le précédent article, nous avons mis en œuvre un objet connecté au travers du réseau IOT The Things Network. Nous avons utilisé Cayenne my devices pour la construction du Front End. Je vous propose dans cet article de le construire à l'aide de Node Red. L'objet connecté sera le capteur de température et d'humidité construit autours d'une carte THE THINGS UNO et d'un DHT11 vu dans le précédent article.

Réseau The Things Network
On parle partout de l'Internet des Objets. Mais qu'est-ce que c'est au juste ? On connait Internet, ce truc auquel on se connecte au moyen d'un câble réseau, de la fibre optique ou en wifi à partir d'une box, ou bien encore avec un téléphone portable 3G ou 4G. L'accès à ces réseaux n'est pas gratuit, on paye un abonnement, ou quelqu'un paye un abonnement ! Le volume de données qui transite sur ces réseaux est considérable, mais ce n'est rien en comparaison de ce qui nous attend si on fait communiquer tous les objets qui nous entoure, même s'ils devaient se limiter à quelques échanges quotidien et générer de faibles volumes de données chacun. De plus, lorsque notre principale préoccupation, c'est d'obtenir le contenu souhaité le plus rapidement possible, soit avoir le meilleur débit possible, les objets peuvent se contenter d'un réseau bas débit, voir très bas débit (quelques kb/s).

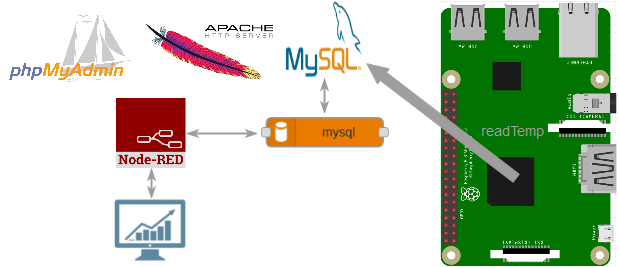
Node red et MySql
Dans cet article, je vous propose de mettre en oeuvre une solution de sauvegarde de données dans une base de données MySql. Nous utiliserons les informations issues du capteur de température du CPU de notre Raspberry Pi toutes les minutes pour peupler la base de données. Nous utiliserons Node Red pour les lire et les présenter sous forme d'un tableau et d'un graphique retraçant l'évolution des dernières mesures. Pour cela il nous faudra procéder à l'installation de MySql sur notre Raspberry. Pour faciliter la gestion des bases de données MySql, nous installerons également un serveur Apache et phpMyAdmin en suivant au choix un de ces tutoriels :
- http://www.pihome.eu/2017/11/02/install-apache-php-7-0-mysqlmariadb-raspberry-pi-lamp/
- https://www.youtube.com/watch?v=kQ0HoLva9Yc
Géolocalisation avec Node Red
Certain projet peuvent nécessité la mise en œuvre d'une géolocalisation intégrant ou non un capteur GPS. Le but ici est de mettre en place une géolocalisation basée sur l'API de Google à l'aide de Node Red.
Tutoriel Node-Red
Dans de nombreux projets, l'IHM est constituée d'une application web accessible depuis un navigateur. Il n'est pas toujours aisé de programmer le lien entre le matériel (capteurs et/ou actionneurs) et la page web fournie à l'utilisateur. Une solution consiste à utiliser un script Python dont l'exécution peut être planifiée avec Cron, pour interagir avec le matériel, lire les données des capteurs et les stocker dans une base de données comme MySQL. Un serveur web comme Apache2, via une page web php, met à disposition des utilisateurs les informations. Cette solution décrite dans un précédant article nécessite la mobilisation de nombreuses technologies et plusieurs langages de programmation, contraignant les développeurs du projet à retarder la mise œuvre d'un prototype pour se former.
Combiné avec une solution matérielle constituée d'une Raspberry et éventuellement une carte Arduino, Node Red se révèle être une alternative très intéressante :
Node-RED est un outil puissant pour construire des applications de l'Internet des Objets (IoT) en mettant l'accent sur la simplification de la programmation qui se fait grâce à des blocs de code prédéfinis, appelés «nodes» pour effectuer des tâches. Il utilise une approche de programmation visuelle qui permet aux développeurs de connecter les blocs de code ensemble. Les nœuds connectés, généralement une combinaison de nœuds d'entrée, de nœuds de traitement et de nœuds de sortie, lorsqu'ils sont câblés ensemble, constituent un «flow».
Formation STS SN Packet Tracer Activity Wizard
Cisco Packet Tracer est un programme de simulation de réseau puissant qui permet aux étudiants d'expérimenter le comportement du réseau.
Packet Tracer fournit la simulation, la visualisation, la création, l'évaluation et les capacités de collaboration et facilite l'enseignement et l'apprentissage des concepts technologiques complexes.
Packet Tracer complète l'équipement physique dans la salle de classe en permettant aux élèves de créer un réseau avec un nombre presque illimité de périphériques, d'encourager la pratique, la découverte et le dépannage. L'environnement d'apprentissage basée sur la simulation aide les élèves à développer des compétences tels que la prise de décision, la pensée créative et critique, et la résolution de problèmes.
Le module Activity Wizard de Packet Tracer est un assistant de création d’activités. Il est conçu pour améliorer l'enseignement et l'apprentissage en permettant la création de scénarios d’activités et d’évaluations dans un environnement structuré. Dans cette formation, vous apprendrez à créer une activité simple basée sur un scénario unique, puis une activité qui utilise des variables pour permettre de diversifier les scénarios.
A la fin de se module, vous serez en mesure de concevoir une activité auto évaluée à l'aide de "l'assistant de création d'activités" de Packet Tracer.

Structure d’un premier objet communicant
Le but de ce tutoriel est de mettre en œuvre une structure type d'un objet communicant basé sur l'utilisation d'une carte Arduino pour la partie acquisition/actionneurs et d'une carte PC embarqué (pcDuino, Raspberry Pi, ...) pour la partie traitement (script Python, programme C/C++, ...), connexion au réseau (filaire ou wifi), stockage local des données (serveur de bases de données SQLigth, MySQL, ...), mise à disposition des données (serveur web Apache2, lighttpd, ginx, ...). La connexion entre ces deux carte se fait naturellement par une liaison série sur USB. Le synoptique ci-dessous représente par exemple un système de surveillance de la hauteur et de la qualité de l'eau d'un cours d'eau. La température, le Ph et la hauteur de l'eau sont mesurés sur demande par la carte Arduino. Le pcDuino via un scritp Python dont l'exécution peut être planifiée avec Cron, effectue la demande puis lit les réponses et les stockent dans la base de données MySQL. Apache2, via une page web php, met à disposition des utilisateurs les informations.

Synoptique Sorgomètre - Carla ISN 2016
Kinect Microsoft dans un projet Windows Form C#
L'utilisation de la Kinect de Microsoft dans un projet nécessitant une localisation dans l'espace d'une personne peut s'avérer très utile. Microsoft met a disposition des développeur un SDK avec plusieurs exemples de programmes dans différents langages. Toutefois, aucun exemple de programmation à partir d'un projet Windows Form n'est fourni. C'est pourtant ce type de projet que l'on va privilégier au niveau terminal S-SSI ou STI2D SIN.
Cet article est un tutoriel de mise en œuvre de la Kinect dans un projet Windows Form en C# avec Visual Studio.

L'intérêt de la Kinect en robotique est évident. Elle permet de doter vos robots d'une capacité de reconnaissance de la présente d'un humain dans son environnement, d'interpréter ses gestes et bientôt, d'interpréter son expression faciale et de faire de la reconnaissance vocale. Le capteur Microsoft Kinect est donc un capteur de choix pour vos robots.