
Constituants d'un robot
Un robot intelligent est un assemblage complexe de pièces mécaniques et de pièces électroniques, le tout pouvant être piloté par une intelligence artificielle. Lorsque les robots autonomes sont mobiles, ils possèdent également une source d'énergie embarquée : généralement une batterie d'accumulateurs électriques.

Les capteurs
Dans un robot, la perception est assurée par l'utilisation de capteurs. Ces derniers donnent une information à propos de l'environnement ou des composants internes (p.e. position d'un moteur ou d'un vérin, état d'une LED). Cette information est utilisée pour calculer l'ordre approprié à envoyer aux actionneurs.
Il existe une grande variété de capteurs. Par exemple :
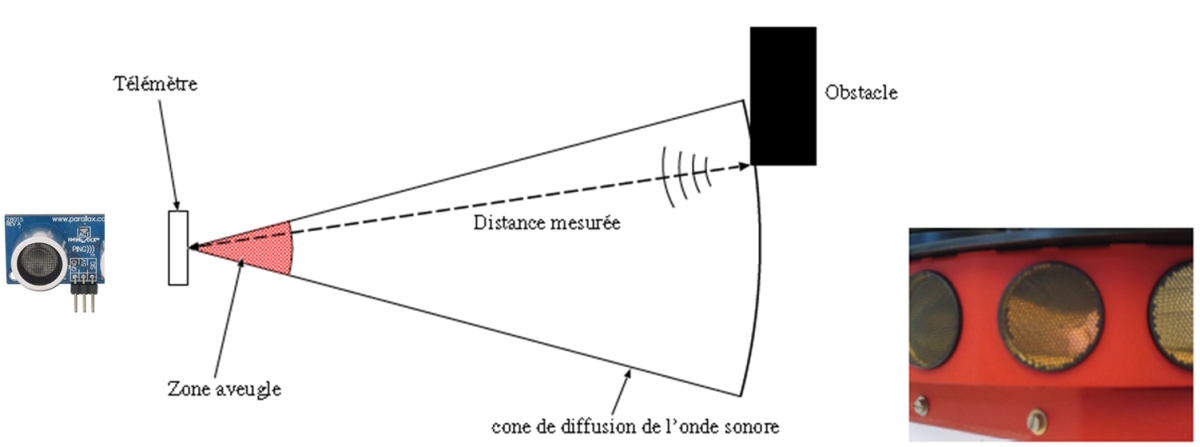
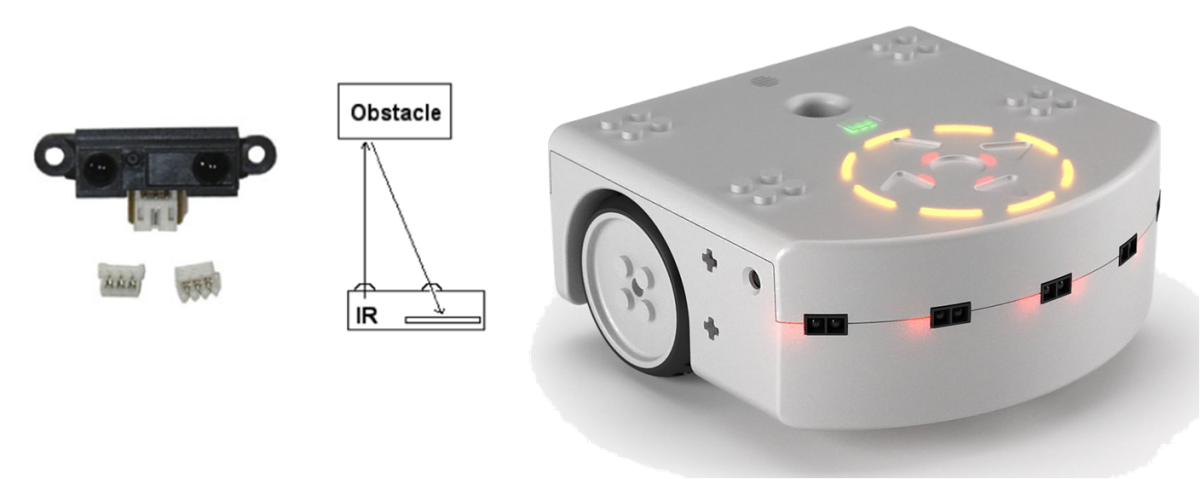
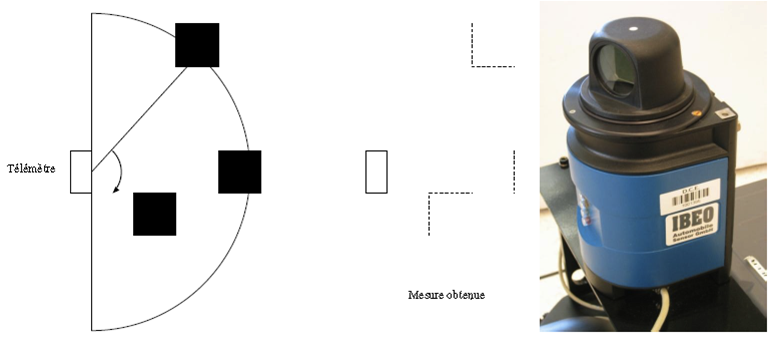
Les télémètres à Ultra-son, infrarouge ou LASER. Ces derniers sont à la base des scanners laser permettant à l'unité centrale du robot de prendre "conscience" de son environnement en 3D.
|
|
|
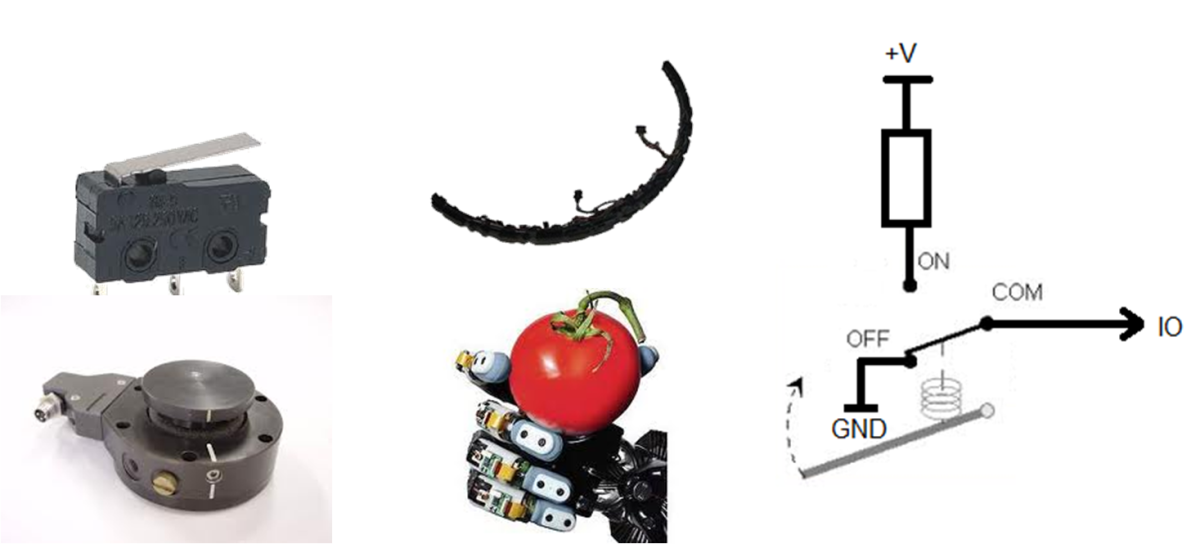
Des capteurs tactiles sont utiliser pour détecter les collisions et pour assurer les opérations de préhensions.
|
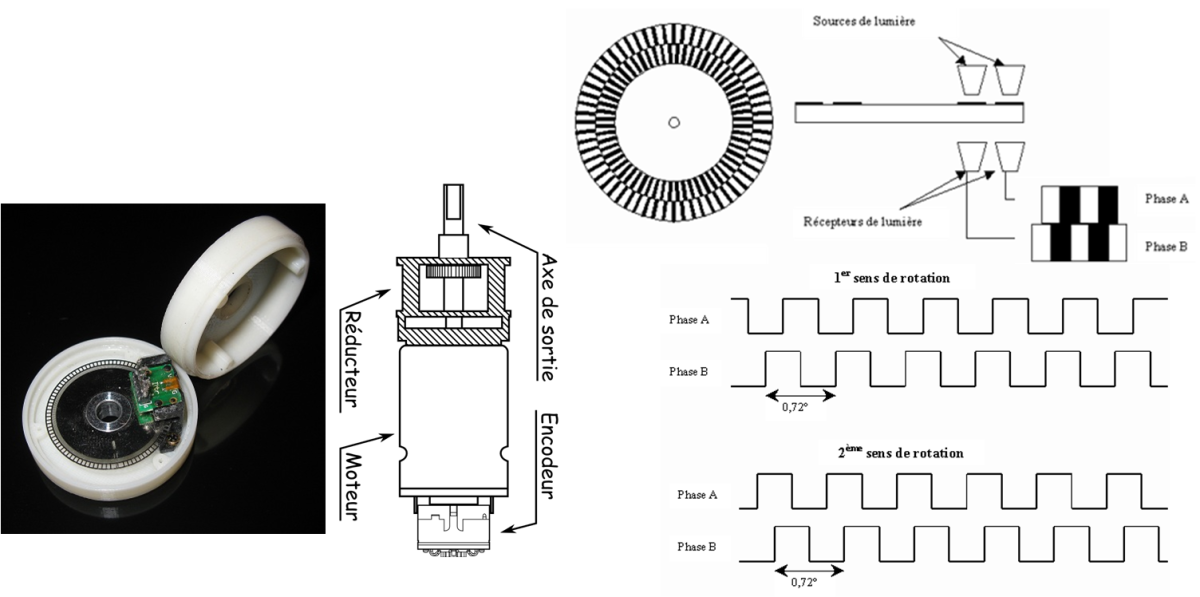
Dans le cadre d'un robot roulant, des roues codeuses (odomètre) permettent un déplacement précis en mesurant les angles de rotation.
|
Des caméras sont souvent les yeux des robots. Il en faut au moins deux pour permettre la vision en trois dimensions. Le traitement automatique des images pour y détecter les formes, les objets, voire les visages, demande en général un traitement matériel car les microprocesseurs embarqués ne sont pas assez puissants pour le réaliser.
Les centrales inertielles, composées d'un accéléromètre qui mesure l'accélération en translation, d'un gyromètre qui mesure l'accélération de rotation, d'un gyroscope qui mesure la position angulaire par rapport à un axe de référence et d'un magnétomètre ou boussole électronique, permettent au robot de se situer précisément dans l'espace. Elle souvent complétée par un capteur GPS.
|
|

Les actionneurs
Les actions du robots sont réalisée à l'aide d'actionneurs. Ce sont des organes qui transforment l'énergie qui leur est fournie en un phénomène physique utilisable comme des mouvements.
Les actionneurs les plus usuels sont :
des moteurs électriques rotatifs, qui sont fréquemment associés à des réducteurs mécaniques à engrenages.
des vérins hydrauliques, reliés par une tuyauterie à des pompes fournissant des pressions élevées.
Généralement, un actionneur peut être considéré comme un constituant d'un système mécanique (exemple : bras, patte, roue motrice...) et correspond à un degré de liberté.
Les interfaces haptiques permettent au robot de saisir des objets. Les moteurs permettent à des éléments mobiles de bouger suivant un ou plusieurs degrés de liberté; elles sont plutôt des constituants appartenant au domaine de la télémanipulation.
Dans le cas d'un robot mobile, l’ensemble des actionneurs qui permettent le déplacement du robot sont regroupés dans la base mobile :
Base holonome : le nombre de degrés de libertés contrôlables est égal au nombre total de degrés de liberté. A partir d'une position donnée, une plateforme holonome devra donc pouvoir se déplacer en avant, sur le coté et tourner sur elle-même, le tout simultanément. | 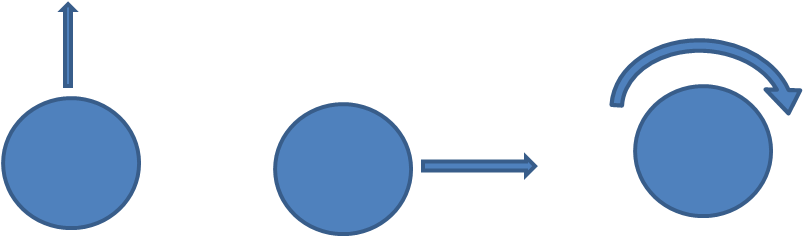 Principe d'une base robotique holonome |
Base robotique différentielle à roues ou à chenilles : 2 moteurs indépendants.

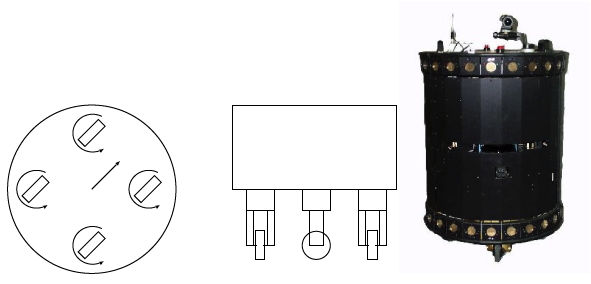
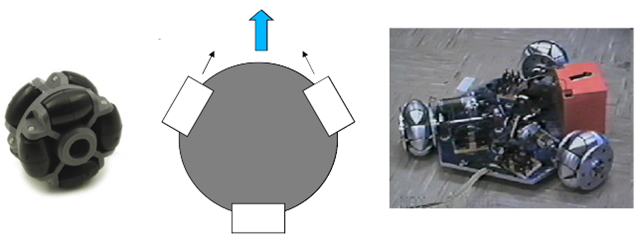
Base robotique omnidirectionnelle : au moins trois moteurs indépendants.
|
|
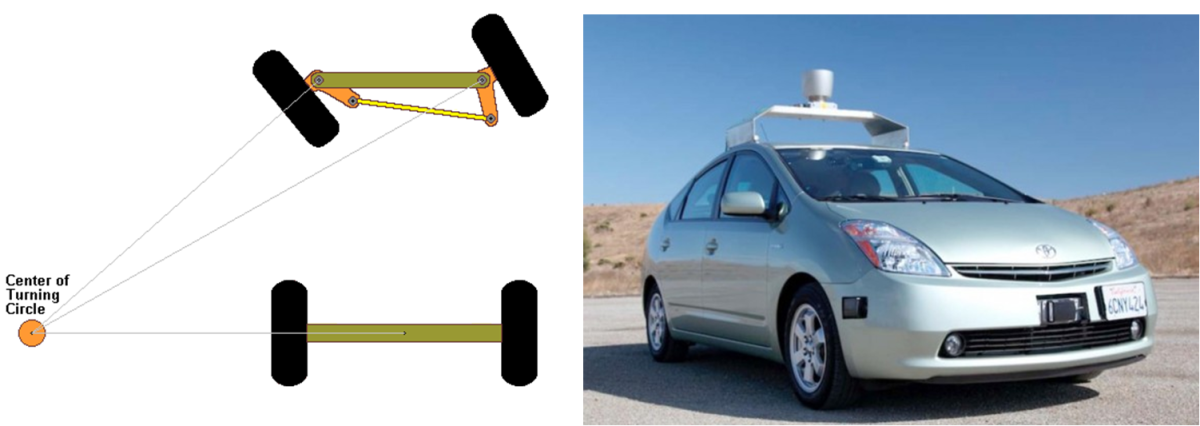
Base robotique non-holonome : Un seul moteur de motion et un système de direction.
Base robotique à Pattes : Imite la manière de se déplacer des insectes, des animaux ou des humains.

Les systèmes de traitement de l'information
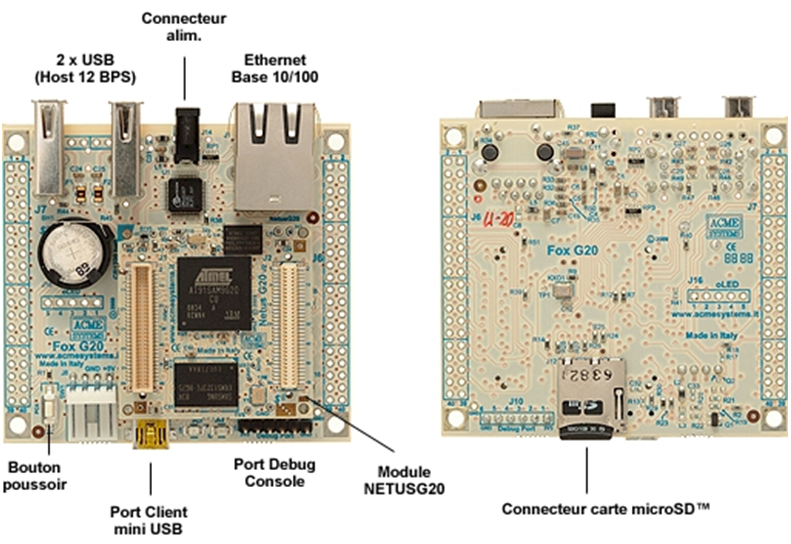
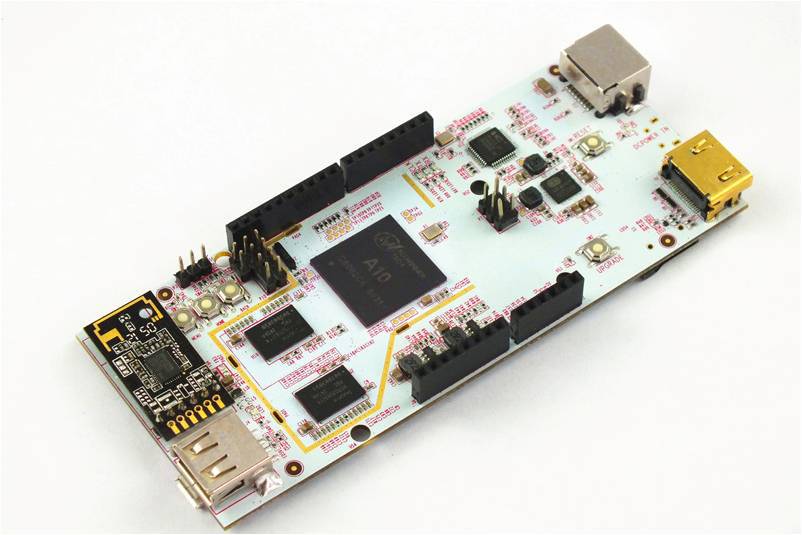
L'ordinateur embarqué : utilisent généralement des microprocesseurs à basse consommation d'énergie ou des microcontrôleurs. Ils disposent d'un système d'exploitation qui facilite la gestion des tâches à effectuer. Plusieurs programmes peuvent être exécuter simultanément.



Exemple : Google Car
Ce prototype est un modèle biplace à propulsion électrique. Le volant et les pédales ont disparu de l'habitacle. À la place, seulement deux boutons, Marche et Arrêt, logés dans la console centrale et un écran pour suivre le trajet. Le passager indique son itinéraire depuis une application mobile sur son smartphone, et la voiture prend la main grâce à ses capteurs et au logiciel de navigation autonome. Sur le toit est installé le système de détection de l'environnement, basé sur des caméras et un lidar. Sur les côtés du véhicule, de nouveaux radars à plus longue portée et des lidars sont installés afin d'éliminer les angles-morts et des capteurs odométriques sont placés sur les roues motrices.
Elle utilise un concept qualifié de « conduite défensive » qui prévoit notamment que la voiture attende une seconde avant de démarrer lorsque le feu passe au vert. Les systèmes mécaniques ont été doublés au niveau de la direction et du freinage de telle sorte que la voiture pourra toujours tourner et freiner en cas de défaillance. La vitesse est bridée à 40 km/h.





