Les ordinateurs embarqués sous le système d’exploitation Linux sont massivement présents dans les technologies modernes (transports, multimédia, téléphonie mobile, appareils photos …).
L’ordinateur Raspberry PI constitue un support d’apprentissage performant, très bon marché et disposant d’une forte communauté sur le net. Il possède des entrées/sorties puissantes permettant une connexion avec le monde physique par l’intermédiaire de capteurs et d’actionneurs.
L’objectif de ce TP est de réaliser une rapide prise en main d’un système embarqué au travers d’un ordinateur Raspberry PI qui sera largement utilisée en projet et d’effectuer un tour d’horizon des pratiques de mise en œuvre et de développement.
Présentation de l’activité
Objectifs
Se remémorer :
-
les bases de la programmation en C/C++ :
-
les principes de la compilation
Apprendre :
-
la gestion un système embarqué
-
la gestion des fichiers sur un système déporté (ssh, scp, Dolphin, …)
-
les principes et les avantages de la cross-compilation
Mettre en oeuvre :
-
les méthodes de développement sur/pour un système déporté
Durée
-
Entre 4h et 6h
Ressources
Matériel(s) :
-
1 PC avec système d’exploitation Linux
-
1 Raspberry Pi avec OS Débian
Logiciel(s) :
-
cross-compilateur
arm-linux-gnueabihf-g++
Documentation :
-
Cours de Mr Antoine sur la programmation objet de 1ière année (disponible sur Chamilo).
-
Sites de référence sur C/C++ :
-
cplusplus.com
-
cppreference.com
-
…
-
Pré-requis
-
Maîtrise du langage C (séquences, tests, boucles, variables, fonctions, paramètres, compilation multi-fichiers)
Compte rendu
Il sera constitué :
-
des réponses aux questions en veillant à soigner la rédaction
-
des programmes source commentés
1. Le Raspberry Pi
1.1 Présentation
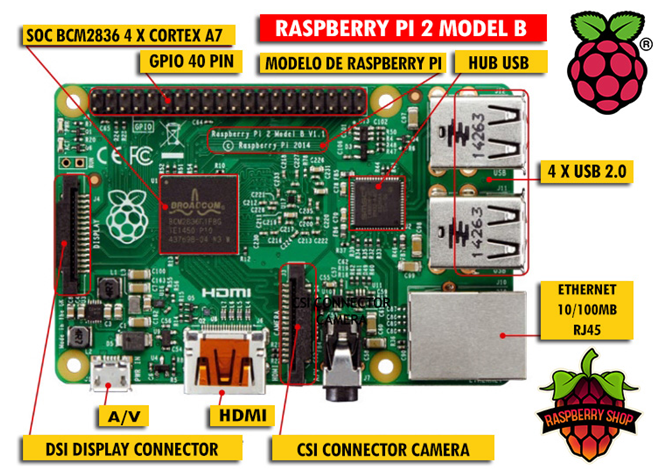
Raspberry Pi est un petit ordinateur sous le système d’exploitation Linux sur carte SD destiné à des applications d’informatique embarquée. Le cœur de l’ordinateur est un FPGA intégrant un processeur, de la RAM et de nombreux périphériques.
Exercice 1
-
Quel est la référence du processeur qui équipe votre carte Raspberry Pi 2 ?
-
Quel est son type d’architecture ?
-
Combien de cœurs possède-t-il ?
-
Quel est la quantité de RAM disponible ?
-
Quels sont les bus de communication disponibles ?
-
Quelle version de VFP (Vector Foating Point) supporte-il ?
Raspberry Pi peut être directement connecté à une IHM classique, souris/clavier/ecran HDMI ou vidéo composite, cependant comme tout ordinateur Linux, Raspberry Pi peut intégrer ses propres outils de développement et une IHM reposant sur SSH contrôlable depuis un autre ordinateur par Ethernet ou WIFI.
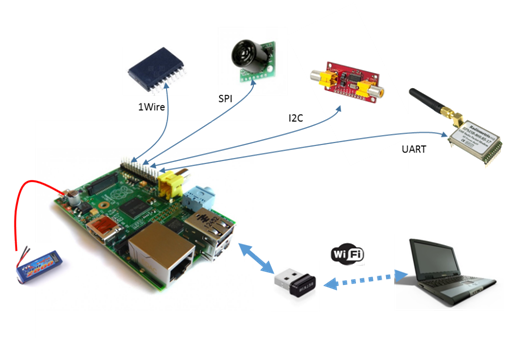
Le connecteur d’extension supporte les entrées/sorties parallèles ainsi que la plupart des bus de communication. C’est un support particulièrement économique et puissant qui peut être facilement mis en œuvre dans de petits systèmes nécessitant un accès au monde physique par des capteurs/actionneurs disposants d’interfaces numériques.
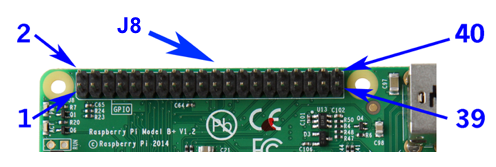
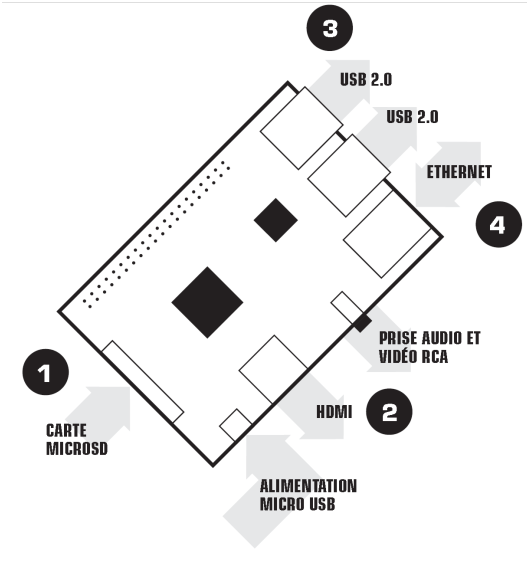
1.2 Les connecteurs d’extensions
Le connecteur d’extension de la carte Raspberry PI est utilisé pour raccorder des périphériques de communication (UART, I2C, SPI, …) ou TOR (Tout Ou Rien).
Les broches peuvent avoir des fonctions différentes suivant qu’elles sont activées en tant que GPIO (Global Purpose Input Output), périphérique de communication ou sorties PWM (Pulse Width Modulation).
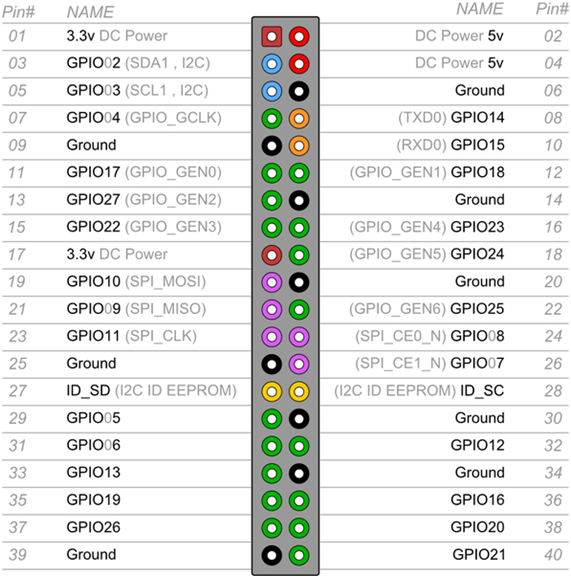
Exercice 2
-
Identifiez les broches à utiliser pour la communication UART
-
Donnez la signification des noms de broches suivant : RXD0, TXD0, SDA1, SCL1
2. Raspbian
2.1 Présentation
Raspbian est un système d’exploitation libre basé sur la distribution GNU/Linux Debian, et optimisé pour le plus petit ordinateur du monde, le Raspberry Pi.
Raspbian ne fournit pas simplement un système d’exploitation basique, il est aussi livré avec plus de 35 000 paquets, c’est-à-dire des logiciels pré-compilés livrés dans un format optimisé, pour une installation facile sur votre Raspberry Pi via les gestionnaires de paquets.
Le Raspberry Pi est une framboise merveilleuse, mais elle reste néanmoins dotée d’une puissance inférieure à celle d’un ordinateur moderne. Par conséquent, il est préférable d’installer un système optimisé pour lui.
Raspbian a été créé dans cette optique, et il est donc tout particulièrement adapté au Raspberry Pi.
Par ailleurs, en tant que distribution dérivée de Debian, il répond à la majeure partie de la très vaste documentation de Debian.
2.2 Téléchargement et installation
Exercice 3
-
Téléchargez la dernière image de Raspbian et déployez la sur la carte microSD à votre disposition :
$ sudo dd if=dateRev-raspbian-dist.img | pv | sudo dd of=/dev/sdx bs=4096|
Remplacez x dans sdx par la lettre de média appropriée ! dateRev-raspbian-dist.img est le nom de l’image de Rapbian téléchargée |
3. Prise en main directe
|
Avant de brancher quoi que ce soit
|
3.1 Démarrage
Au premier démarrage, l’écran suivant apparait, sinon utilisez la commande :
$ sudo raspi-config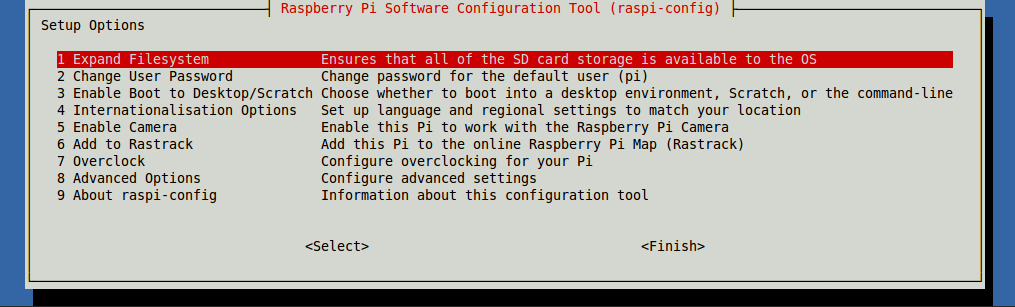
Le mot de passe par défaut de l’utilisateur pi est raspberry
|
Exercice 4
-
Indiquez votre emplacement géographique et heure, (locale et timezone).
-
Étendez le système de fichier à l’ensemble de la carte SD en sélectionnant l’option
Expand filesystemdans le menuAdvanced Options -
Configurez le clavier et activez le serveur SSH.
3.2 Connexion au réseau
Pour se connecter à un réseau, il faut renseigner le fichier interfaces :
$ vi /etc/network/interfacesExercice 5
-
Configurez la connexion filaire pour recevoir automatiquement les paramètres - - Identifiez votre adresse IP.
-
Vérifiez dans le navigateur l’accès à internet.
|
Que faire si la résolution de nom d’hôte échoue ?
Si la résolution de nom échoue, il faut renseigner le fichier le DNS dans fichier Pour trouver l’adresse du DNS, utilisez la commande : Ce fichier peut être écrasé au prochain démarrage de la Raspberry Pi et donc empêcher l’accès à internet pour installer par exemple des paquets logiciels. Pour corriger ce problème :
|
3.3 Mise à jour
-
Mise à jour de la liste des paquets
$ sudo apt-get update-
Mise à jour des paquets installés (NE PAS FAIRE ICI !)
$ sudo apt-get upgrade-
Mise à jour de la distribution Raspbian (NE PAS FAIRE ICI !)
$ sudo apt-get dist-upgrade4. Compilation sur cible
4.1 Définition
C’est le mode de compilation le plus simple : on procède comme sur un PC fonctionnant sous une distribution classique le linux.
4.2 Mise en oeuvre
Exercice 6
-
Saisissez le programme suivant en enregistrez dans le dossier personnel de l’utilisateur pi sous le nom
hello1.cpp:
#include <iostream>
#include <string>
using namespace std;
int main()
{
string prenom;
cout << "Test d'ecriture et de compilation d'un programme C++ sur Raspbery PI " << endl ;
cout << "- Ecriture sur cible " << endl ;
cout << "- Enregistrement local " << endl ;
cout << "- Compilation sur cible " << endl ;
cout << "Quel est ton prenom ? " ;
cin >> prenom;
cout << "Bonjour " << prenom << endl;
}-
Compilez et exécutez le programme. Sauvegardez le rapport de compilation.
$ g++ -ftime-report hello1.cpp –o hello15. Prise en main à distance
5.1 ssh / scp
En général, les systèmes embarqués n’ont pas de moniteur, de clavier et de souris, ils sont conçus pour fonctionner à l’intérieur d’un système matériel et donc inaccessible. Leur gestion se fait alors à distance, par l’intermédiaire de liaisons de communications séries (souvent RS232) ou par réseau filaire ou wifi.
On accède alors au système en mode console grâce au protocole SSH (Secure Shell) et on gère les fichiers grâce à l’utilisation de protocoles d’échange comme FTP, SFTP ou encore SCP.
On peut également gérer l’interface graphique en mode distant (« terminal distant ») mais l’utilisation d’une interface graphique dans la plupart des systèmes embarqués est une hérésie. Elle consomme des ressources inutilement.
5.2 Hôte linux
Sur un hôte linux standard, les protocoles SSH et SCP sont généralement déjà installé.
Depuis un hôte linux connecté au réseau, ouvrez une session SSH avec la Raspberry PI dans un terminal. Explicitez les différentes étapes.
Exercice 7
-
Depuis un hôte linux connecté au réseau, ouvrez une session SSH avec la Raspberry PI dans un terminal. Explicitez les différentes étapes lors de la première connexion.
$ ssh <ip_raspberry>La commande scp permet de copier un fichier ou un répertoire (option -r) d’un client vers un serveur ou d’un serveur vers un client.
$ scp <Fichier_local> <login@IP_client_distant:Chemin>
$ scp <login @IP_serveur_distant:Chemin/Fichier>-
Depuis votre hôte linux, copiez le fichier
hello1.cppprésent sur la Raspberry PI dans votre dossier personnel. -
Explicitez les différentes étapes et donnez la syntaxe précise utilisée.
-
Le gestionnaire de fichiers de l’hôte local Linux openSuse est Dolphin. Ce gestionnaire de fichiers permet de se connecter à un serveur distant et de monter le dossier indiqué dans le système de fichiers local, ce qui permet d’y naviguer graphiquement. Cliquez sur l’icone réseau et ajoutez un dossier réseau qui pointe vers le dossier racine de votre Raspberry.
-
Explicitez les différentes étapes et les illustrer avec des copies d’écran.
-
Ouvrez l’éditeur de texte de votre hôte linux (Kate par exemple), saisissez et enregistrez localement le programme suivant sous le nom
hello2.cpp:
#include <iostream>
#include <string>
using namespace std;
int main()
{
string prenom;
cout << "Test d'ecriture et de compilation d'un programme C++ sur Raspbery PI " << endl ;
cout << "- Ecriture sur hote distant linux " << endl ;
cout << "- Enregistrement sur hote distant puis transfert sur cible " << endl ;
cout << "- Compilation sur cible depuis hote distant " << endl ;
cout << "Quel est ton prenom ? " ;
cin >> prenom;
cout << "Bonjour " << prenom << endl;
}-
Transférez le fichier sur la carte Raspberry PI dans le dossier personnel de l’utilisateur pi.
-
Depuis l’hôte linux openSuse, compilez et exécutez le programme sur la cible. Sauvegardez le rapport de compilation.
$ g++ -ftime-report hello2.cpp –o hello25.3 Hôte Windows
Sous Windows, on utilisera le logiciel (PC) WinSCP et/ou le client SSH (Secure Shell) Putty.
Exercice 8
-
Téléchargez Putty ici : http://the.earth.li/~sgtatham/putty/latest/x86/putty.exe
-
Téléchargez WinSCP ici et installez-le : https://winscp.net/eng/docs/lang:fr
-
Ouvrez l’éditeur de texte de votre hôte Windows (notepad++ ?) et saisissez et enregistrez localement le programme suivant sous le nom
hello3.cpp:
#include <iostream>
#include <string>
using namespace std;
int main()
{
string prenom;
cout << "Test d'ecriture et de compilation d'un programme C++ sur Raspbery PI " << endl ;
cout << "- Ecriture sur hote distant Windows " << endl ;
cout << "- Enregistrement sur hote distant puis transfert sur cible " << endl ;
cout << "- Compilation sur cible depuis hote distant " << endl ;
cout << "Quel est ton prenom ? " ;
cin >> prenom;
cout << "Bonjour " << prenom << endl;
}-
Transférez le fichier sur la carte Raspberry PI dans le dossier personnel de l’utilisateur pi.
-
Depuis l’hôte Windows, compilez et exécutez le programme sur la cible. Sauvegardez le rapport de compilation.
g++ -ftime-report hello3.cpp –o hello35.4 Cross-compilation
Le processus de compilation mobilise les ressources du système (temps processeur et mémoire). Il nécessite également un espace de stockage suffisant pour l’enregistrement des données temporaires de compilation.
Sur un système embarqué, ces caractéristiques matérielles sont naturellement limitées et il est souvent préférable de procéder à la compilation des sources sur un système plus performant puis de transférer les exécutables obtenus sur la cible.
Ce type de compilation s’appelle cross-compilation ou compilation croisé en français. Il s’agit de compiler sur une machine (PC) pour une autre (Raspberry PI).
Le cross-compilateur doit être construit sur mesure, pour une cible donnée et sur un système hôte donné. Il faut donc le compiler en utilisant le compilateur de l’hôte, des outils pour la cible (binutils) et des bibliothèques C adaptées (libC).
Cette préparation peut être très complexe. Il faut faire les bons choix et résoudre les problèmes de dépendances. Heureusement, il existe des solutions « pré-faites » pour une plateforme et un OS spécifique, par exemple, pour le Raspberry Pi sous Rasbian : https://www.raspberrypi.org/documentation/linux/kernel/building.md
Exrecice 8
-
Sur votre hôte linux openSuse, clonez le dépôt de la chaine de compilation croisée (cross-compilation toolchain) officielle de la fondation Raspberry Pi :
git clone https://github.com/raspberrypi/tools ~/tools
Si l’utilitaire de gestion des dépots git n’est pas installé, procéder à son installation depuis yast
|
-
Renseignez le système sur l’emplacement des fichiers nécessaires à la compilation croisée en mettant à jour la variable d’environnement
$PATH:
$ echo PATH=\$PATH:~/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin >> ~/.bashrc
$ source ~/.bashrc-
Ouvrez l’éditeur de texte de votre hôte linux (Kate par exemple) et saisissez et enregistrez localement le programme suivant sous le nom
hello4.cpp:
#include <iostream>
#include <string>
using namespace std;
int main()
{
string prenom;
cout << "Test d'ecriture et de crosscompilation d'un programme C++ pour Raspbery PI" << endl ;
cout << "- Ecriture sur hote distant Ubuntu " << endl ;
cout << "- Transfert par ssh / serveur monte dans FS Ubuntu " << endl ;
cout << "- Compilation sur hote " << endl ;
cout << "Quel est ton prenom ? " ;
cin >> prenom;
cout << "Bonjour " << prenom << endl;
}-
Depuis l’hôte linux openSuse, compilez, transférez l’exécutable généré et exécutez le sur la cible. Sauvegardez le rapport de compilation.
arm-unknown-linux-gnueabihf-g++ -ftime-report hello4.cpp -o hello4 -static-libstdc++-
Explicitez les différentes étapes.
6. Conclusion
-
Dressez un tableau des différentes méthodes pour obtenir un exécutable pour le Raspberry Pi.
Développement |
Durée de compilation |
Transfert exécutable |
-
Conclure sur l’intéret d’utiliser la compilation croisée